流体转子陀螺仪
陀螺仪被称为流体转子陀螺仪;第二种类型是容器不移动,其中充满导电流体,并且流体通过合适的方法(例如,旋转磁场)相对于容器围绕陀螺旋转轴旋转。这种陀螺仪被称为电磁流体陀螺仪。
。
球形容器腔内充满了均匀的液体。
球形容器由马达驱动,以围绕对称轴高速旋转。容器中的流体与腔体一起高速旋转,并且压力差传感器布置在腔体的一侧。
传感器的开口与腔的旋转轴之间的角度是。当腔体高速旋转时,流体相应地旋转,并且流体的旋转轴线与容器的旋转轴线重合。
差压传感器的上端口和下端口的敏感流体压力相等,并且陀螺仪的信号为零。当容器具有拐角时,差压传感器的两个端口与流体旋转轴之间的距离不相等。
以上距离如下。流体围绕流体的瞬时旋转轴线旋转,并且由两个端口处的流体的旋转产生的离心力是不同的,并且差压传感器输出差压信号。
由于差压传感器随腔体旋转,差压信号随着腔体的旋转而成为正弦变化信号,并且信号的幅度与腔体的旋转轴线与腔体的瞬时旋转轴线之间的角度成比例。流体。
流体转子陀螺仪在闭环状态下工作,即,从动系统根据差压传感器输出的信号解调信号,得到倾斜角,当驱动致动器时,腔沿相反方向旋转,这样两个旋转轴重合。可以看出,流体转子陀螺仪具有相同的“固定轴”。
作为机械转子陀螺仪,它可以灵敏地测量容器的偏转。如果没有跟踪跟踪系统,则通过腔的旋转引起流体的旋转。
流体的旋转轴自动且缓慢地接近腔的旋转轴,因此没有快速跟随系统,并且流体转子的轴向旋转不会出现。
机械磨损问题对陀螺仪的性能没有影响或影响很小;容器充当框架;流体转子总能满足静态和动态平衡要求;均匀液体始终满足相同弹性的要求;结构简单,容器制造;温度分布不均匀和流体的热膨胀会影响陀螺仪的特性。
您可能还喜欢这些产品













- 分立半导体组件在现代电子系统中的关键作用
分立半导体组件在现代电子系统中的关键作用分立半导体组件作为构建复杂电子系统的“基石”,在各类终端产品中扮演着不可或缺的角色。从家用电器
- RLPL超大电流宽电极大功率电流采样电阻:高性能电力电子应用的理想选择
RLPL超大电流宽电极大功率电流采样电阻概述在现代电力电子系统中,高精度、高可靠性的电流采样技术是实现精准控制与保护的关键。RLPL系列超大电流
 电流检测电阻两端电压计算 采样电阻转化电流为电压 高低端采样的问题
电流检测电阻两端电压计算 采样电阻转化电流为电压 高低端采样的问题为了在电源回路中,低成本的方案,尽可能准确的采集到回路电流,最常用的办法就是采样电阻。一般选用精密电阻串到电流回路中,计算好电流与
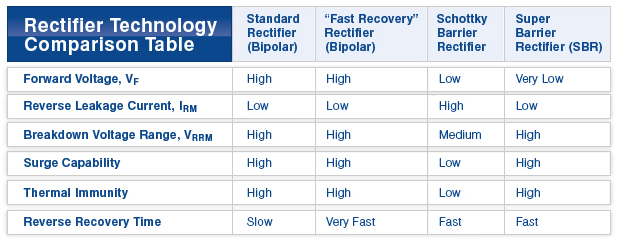
- 二极管与整流器:工作原理及在电源转换中的应用对比
二极管与整流器的基本概念二极管是一种具有单向导电特性的半导体器件,仅允许电流在一个方向通过。在电子电路中,它常被用于整流、开关和信号调
 高精密低电阻测量仪
高精密低电阻测量仪显示Display荧屏尺寸98mm*58mm, 四色高清VFD彩屏98mm*58mm, 4-color VFDTFT4.3寸真彩液晶显示4.3 inch TFT LCD测试参数Parameters直流电阻、温度DC resistance, temperature直流电
 高分子PTC自恢复保险丝过流维护运用
高分子PTC自恢复保险丝过流维护运用高分子PTC自恢复保险丝的过电流维护与应用: 1、 PTC效应是指材料的正温度系数(PTC)效应,这意味着材料的电阻随着温度的升高而增加。大多
 接地电阻测试仪线怎么插?
接地电阻测试仪线怎么插?接地电阻测试仪专门用于测试接地装置的电气完整性。与绝缘子故障检测器一样,它是电气测试中不可或缺的一部分,也是常规测试项目。主要测试
- 接触网接地电阻测试仪使用
接地电阻测试仪正确使用方法如下: (1)首先按规定埋置好表附的辅助接地探针及连接导线(C-一接40m长线,P一接20m短线,E-接接地极)。 (2)断开
- 薄膜电流感应芯片电阻:高精度电子元件的核心选择
薄膜电流感应芯片电阻:高精度电子元件的核心选择在现代电子设备日益追求小型化、高性能与高可靠性的背景下,薄膜电流感应芯片电阻凭借其卓越的
- 金属氧化物半导体场效应晶体管的技术演进与未来发展方向
从传统平面结构到三维架构:MOSFET的进化之路自1960年代首次提出以来,金属氧化物半导体场效应晶体管经历了多次重大技术革新。早期的平面型MOSFET在2
- 双极晶体管与高压晶体管的技术原理及应用对比分析
双极晶体管与高压晶体管的核心技术解析双极晶体管(Bipolar Junction Transistor, BJT)是电子电路中广泛应用的一种半导体器件,其工作原理基于电子和空穴
- 电容式物位开关:一种高效的固体与液体物位检测解决方案
电容式物位开关是一种广泛应用于工业自动化领域的传感器设备,它能够有效检测各种固体、液体物质的位置或界面。其工作原理是通过电容器的变化来
- 金属氧化物半导体场效应晶体管在气敏传感器中的应用与性能分析
金属氧化物半导体场效应晶体管(MOSFET)在气敏元件中的核心作用金属氧化物半导体场效应晶体管(MOSFET)作为现代微电子器件的核心组件,近年来在气
 用于分析和改进锂离子电池效率和寿命的 Precision Bulk Metal® Z 箔电流检测电阻器
用于分析和改进锂离子电池效率和寿命的 Precision Bulk Metal® Z 箔电流检测电阻器Bulk Metal® Z-Foil 电流检测电阻器的使用显着降低了噪声水平,从而显着提高了用于测试和改进锂电池的高精度和超高精度充电器的准确度- 离子电池的效率
- 从基础到前沿:双极晶体管与高压晶体管的发展趋势展望
双极晶体管与高压晶体管的演进路径与未来方向随着半导体材料与制造工艺的进步,双极晶体管与高压晶体管正朝着更高性能、更小体积和更强集成度的
- 内导体半径与外导体半径对圆柱形电容器性能的影响研究
内导体与外导体半径比对电容器性能的决定性作用在分立半导体圆柱形电容器的设计中,内导体半径(a)与外导体半径(b)的比值是决定其电气性能的
- 分流器电阻与分流电阻器的原理及交流直流应用差异解析
分流器电阻与分流电阻器的基本概念分流器电阻(Shunt Resistor)是一种用于测量电流的精密电阻元件,其核心作用是将大电流按比例分流,从而在低电压
- 如何正确选择分流电阻器?从交流到直流的全面对比指南
分流电阻器的核心参数解析在现代电子系统中,分流电阻器是实现电流传感的关键器件。其性能直接影响测量系统的准确性与可靠性。以下是关键参数说
 直流电流扩大量程采用并联分流电阻的方法
直流电流扩大量程采用并联分流电阻的方法直流电流表扩大量程: 扩大电流表量程的目的是用小量程电流表测量较大电流,而通过电流表表头的电流仍然不能越过原来量程,因此必须能表头
- 分流电阻与保险丝在交流直流电路中的应用差异解析
分流电阻与保险丝的基本概念分流电阻(Shunt Resistor)是一种用于测量电流的精密电阻,通过其两端的电压降来推算流经的电流值。而保险丝(Fuse)则是